 Future Bus : le transport urbain d’après-demain
Future Bus : le transport urbain d’après-demain
Ils sont principalement liés à la perception de son environnement par le véhicule autonome. Aujourd’hui Google ou d’autres font des essais avec des radars Lidar, qui sont très onéreux mais très précis. On essaie de développer des solutions alternatives. Des Lidar à bas coûts sont à l’étude. Mais ces solutions alternatives ne permettent pas d’avoir une précision fine, encore moins quand on monte en vitesse ou lorsqu’il y a de mauvaises conditions météo. Une autre solution alternative consiste à utiliser les solutions basées sur la communication entre les véhicules et les infrastructures (C-ITS). Cette solution apporte de la précision dans la perception. Je suis convaincu qu’il y aura convergence entre le véhicule autonome et le véhicule connecté et que par conséquent le véhicule autonome sera également connecté. Le gestionnaire d’infrastructure pourra ainsi communiquer avec le véhicule pour optimiser l’usage de son réseau. A titre d’exemple, un gestionnaire d’infrastructure utilise aujourd’hui des panneaux variables pour communiquer avec les usagers de la route, demain l’information sera transmise par le gestionnaire dans le véhicule. Il pourra ainsi appliquer plus efficacement des mesures de supervisions du trafic comme la gestion dynamique des vitesses pratiquées ou bien transmettre des alertes en cas d’accident. Des obstacles liés à la réglementation Aujourd’hui, c’est la convention de Vienne qui s’applique : elle oblige le conducteur à maîtriser son véhicule. Le conducteur doit avoir au moins les mains sur le volant et être fixé sur son objectif de conduite. Ces règles ne permettent pas d’utiliser des véhicules autonomes. La réglementation doit donc évoluer. C’est en cours. En attendant, il y a des parades dans chaque pays pour autoriser des expérimentations mais c’est à titre expérimental. Des obstacles juridiques Des interrogations se posent en termes d’assurance des risques et de la responsabilité. En cas d’accident, qui est responsable ? Le conducteur ? Le propriétaire ? Celui qui a développé les algorithmes de contrôle ? Des obstacles liés à la cybersécurité et à la sûreté On a vu récemment une université chinoise prendre le contrôle d’un véhicule autonome à distance en ayant exploité des failles de sécurité de son système informatique. La question de la cybersécurité est un enjeu majeur dans le développement du véhicule autonome. A noter également que la cybersécurité fait partie des plans stratégiques de l’Industrie du futur (Nouvelle France Industrielle phase 2) et intègre désormais le secteur automobile. Des obstacles humains De quelle manière l’homme va-t-il interagir avec le véhicule autonome ? La question est posée. Il y a aussi un aspect acceptabilité : il y a pas mal de barrières psychologiques à faire tomber. Le véhicule autonome ne sera accepté que si les usagers ont confiance. Et s’ils voient les bénéfices apportés notamment en termes de sécurité. Des obstacles sociaux Dans les transports publics, il va y avoir un certain nombre d’impacts sur les métiers de conducteur de poids lourd ou de bus. Est-ce qu’on y est préparé ? Je ne le pense pas. Il faudra travailler sur ce volet de l’acceptabilité sociale. Propos recueillis par M.-H. P.
Un régime d’autorisation spécifique
Pour l’heure, hormis le cadre d’une expérimentation, il est impossible de faire circuler un véhicule autonome sur la chaussée en France. En cause, la convention de Vienne de 1968 qui dans son article 8 indique que « tout conducteur doit constamment avoir le contrôle de son véhicule ». Mais les progrès des industriels sont rapides et les pays semblent majoritairement d’accord pour faire en sorte d’autoriser les véhicules autonomes en 2017. « La convention sera révisée à brève échéance, estime Frédéric Mathis, directeur du programme Véhicules de l’Institut Vedecom. Il y a un consensus européen et aux Etats-Unis [qui n’ont pas ratifié la convention, NDLR] pour aboutir à une évolution très significative qui consisterait à dire qu’un ordinateur peut être responsable de la conduite. » Déjà une première petite brèche a été ouverte en mars dernier, avec l’amendement pris par une commission des Nations unies, l'Unece (United Nations Economic Commission for Europe) qui s'est laissée convaincre du fait que « les véhicules à délégation de conduite » peuvent concourir à diminuer le nombre et la gravité des accidents de la circulation. « A compter de ce jour, les systèmes de conduite automatisée seront explicitement autorisés sur les routes, à condition qu’ils soient conformes aux règlements des Nations unies sur les véhicules ou qu’ils puissent être contrôlés, voire désactivés par le conducteur », précise le communiqué de l’Unece du 23 mars. Notons que la présence du conducteur reste indispensable, et qu’on est encore loin d’une légalisation du véhicule autonome… Par ailleurs, en France, la loi relative à la transition énergétique pour la croissance verte du 22 juillet 2015 a validé l'introduction de la voiture autonome. De plus, le plan industriel « véhicule autonome » de la Nouvelle France Industrielle prévoit explicitement de « faire évoluer le cadre réglementaire et normatif en vue de l’expérimentation puis de la mise sur le marché du véhicule autonome ». C’est dans ce contexte que la ministre de l’Environnement et le secrétaire d’Etat aux Transports ont pris une ordonnance le 3 août 2016. L’ordonnance introduit la notion d’autorisation de circulation sur la voie publique spécifique à l’expérimentation de véhicule à délégation partielle ou totale de conduite, qui doit servir de base à un futur décret en Conseil d’Etat. Elle crée un régime d’autorisations interministérielles spécifiques. Il s'agit d'une « étape incontournable vers une mobilité apaisée » participant « de l'amélioration de la sécurité routière, de la diminution de la congestion du trafic, de l'accessibilité des territoires », souligne le ministère de l'Environnement. Pour autant, l’essentiel du cadre légal des voitures comme des navettes reste à venir. L'objectif est de parvenir à édifier « un seul et unique cadre juridique, gage de sécurité pour les investisseurs », précise le communiqué du ministère. Il y a évidemment énormément de matière à réflexion autour des questions de responsabilité en cas d’accident. Et sans doute que pendant encore plusieurs années, les autorités resteront-elles inflexibles sur la présence à bord d’un opérateur, groom ou accompagnateur… Cécile NANGERONI
4 nouveaux venus, 4 stratégies
Tesla, Google, Apple et Uber… Ces quatre nouveaux venus ont des ambitions fortes sur le véhicule autonome. Mais il ne faut pas les mettre tous sur le même plan. Explications.« Tesla a une avance certaine »,estiment les experts. Mais quand on est précurseur, on essuie aussi les plâtres. En mai dernier une voiture de Tesla a eu un accident, causant la mort de son passager. « La voiture n’avait pas vu le camion. C’est gênant qu’un robot ne voit pas les objets. Il ne suffit pas d’un capteur. Mais il faut suffisamment d’intelligence pour pouvoir interpréter les choses. Tout ce qui se fait autour de l’intelligence artificielle est loin d’être au point actuellement », estime Arnaud de la Fortelle, directeur du Centre de robotique Mines ParisTech. Et il ajoute : « Un véhicule autonome est un véhicule robot. Il se heurte donc à tous les problèmes rencontrés actuellement par la robotique et qui tournent autour du triangle perception-planification-contrôle. Dans le cas de Tesla, la caméra était éblouie par le soleil et le capteur avait pris le camion pour un panneau. La voiture a cru passer sous un panneau, alors que c’était un camion… » « De son côté, Google communique beaucoup sur le sujet mais ses véhicules circulent à 40 km/h, surtout en milieu urbain. Le système n’est pas au point pour circuler sur autoroute. Google ne souhaite d’ailleurs pas devenir un constructeur automobile, mais accumuler de la donnée et rôder ses algorithmes en intelligence artificielle pour devenir incontournable de ce point de vue-là et exploiter des données de circulation et de trajets pour ses autres applications », estime Abdelmename Hedhli, chargé de mission sur le transport intelligent à l’Ifsttar. « Quant à Apple, cette firme cherche plutôt à conserver les automobilistes dans l’environnement de son operating system (OS). Il s’agit de prolonger l’Apple environnement, dans la voiture et dans toutes les interfaces avec la machine », juge Abdelmename Hedhli Enfin, poursuit-il, « selon moi, Uber se positionne directement sur les nouveaux services de mobilité, carsharing, VTC… Son objectif est que, demain, il n’y ait plus de chauffeurs. Les trajets deviendront par conséquent moins chers. Son intérêt est donc d’aller dans le véhicule directement autonome à 100 %. Uber travaille beaucoup sur l’acceptabilité : comment les clients percevront ce nouveau mode de mobilité ? » M.-H. P.
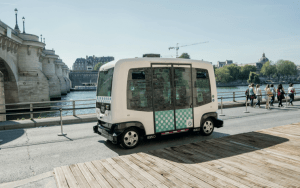
Navettes, un coup d’avance pour les Français
En 1985, l’Inria commençait à développer le premier véhicule autonome. Aujourd’hui deux constructeurs français proposent des navettes : EasyMile et Navya. Un troisième constructeur vient de se lancer aux Etats-Unis, Local Motors associé à IBM. C’est l’Italien Zagato qui avait ouvert le bal en octobre 2009 en présentant son concept de taxi-bus autonome avec mémoire de destination en octobre… 2009, lors du sommet de l’énergie du monde futur à Abu Dhabi. Depuis le carrossier s’est allié avec le hollandais 2GetThere, spécialiste des automatismes, pour promouvoir un « podcar » ou (personnal rapid transit) qui devrait rouler en fin d’année à Singapour. Mais sur le terrain très convoité du microbus électrique (ou navette) 100 % autonome, les pays du Golfe, très demandeurs, se sont fait voler la vedette par l’Europe. Et ce sont deux constructeurs français qui, pour l’instant, semblent plus avancés. Tout a commencé avec l’Inria, notre institut national de recherche dédié au numérique, qui a donné naissance en 1985 à une PME, Robosoft, laquelle développera le véhicule autonome expérimenté à La Rochelle dans le cadre du projet européen CityMobil 2 puis s’alliera avec le constructeur de quadricycles légers Ligier Group (dans une joint-venture à 50-50) pour proposer la navette EZ10 (prononcer ten) sous la nouvelle marque, EasyMile, avec une coentreprise basée à Toulouse. Positionnée sur la niche du dernier kilomètre, l’EZ10 peut fonctionner sur une ligne prédéfinie, en mode métro (elle s’arrête partout), en mode bus (ne s’arrête que si quelqu'un veut la prendre ou descendre) ou en mode flexible comme un transport à la demande. Plus de 20 EZ10 sont déjà en expérimentation dans le monde (Helsinki, Dubai, Singapour, etc.). C’est le modèle que la RATP a présenté en septembre dernier sur la voie Georges-Pompidou et qu’elle souhaite tester sur le pont Charles-de-Gaulle à Paris l’an prochain. Lors de cette présentation, Gilbert Gagnaire, président d’EasyMile, assurait pouvoir dès 2017 fabriquer une centaine de navettes par an dans les usines Ligier. Sa concurrente, qui propose les mêmes possibilités d’exploitation, la navette Arma, est issue des usines lyonnaises de Navya, née du rachat en 2010 de la société Induct Technology qui avait six ans d’existence. D'une voiturette autopilotée, vedette du CES 2013 de Las Vegas, Navya a fait évoluer le véhicule vers les standards du transport collectif, tout en fabricant les batteries. La start-up vient très récemment de lever 30 millions d’euros pour son développement auprès de Keolis, de Valeo et de la société qatarie Group8, ce qui doit lui permettre de conquérir le marché international. Pour l’heure, les deux premiers modèles au nez arrondi ont été vendus à Sion (Suisse), les suivantes à Civaux (site de la centrale nucléaire) à Perth (Australie) ainsi qu’à Lyon, qui a lancé le test du service Navly sur les quais de la Saône dans le quartier d’affaires de Confluence. Les deux navettes françaises, EZ10 et Arma, transportent de 12 à 15 personnes à une vitesse maximale de 40 ou 45 km/h, mais pour l’instant bridée à 20 km/h, et coûtent autour de 200 000 euros. Au moment où Sion inaugurait son expérimentation, c’est à Washington, qu’un autre véhicule faisait son apparition. « Hi, my name is Olli ! », annonçait la navette de Local Motors drivée par IBM Watson IoT. Ce surprenant bijou de technologie, fabriqué en impression 3D (il suffirait d’une douzaine d’heures !), mise sur le dialogue entre l’utilisateur et l’ordinateur de bord. « J’ai faim, où puis-je manger un morceau à cette heure ? », est-il possible de lui demander ! Olli répond et Olli vous transporte. Son prix n’est pas connu, mais Local Motors ambitionne d’en vendre en Eu
Le dossier complet est réservé aux abonnés ou aux détenteurs d’un porte-monnaie électronique, connectez-vous pour y accéder.
*Formule numérique sans engagement à partir de 15,25€ par mois.

Publié le 18/11/2025


Publié le 10/11/2025 - Yann Goubin